23.10.2019 Sasha
Sasha ist ein Assistenz-Roboter und ist von der Firma Toyota mit den Typennamen HSR „Human Support Robot“. Er kommt im privaten und industriellen Bereich zum Einsatz. Er soll Ordnung halten und muss dazu unterschiedliche Objekte und Gegenstände erkennen und zuordnen können. Dazu helfen ihm zwei Weitwinkelkameras und eine Stereokamera. Zur Orientierung besitzt er einen Laser Range Sensor. Das V4R-Team arbeitet an der Entwicklung der Bildverarbeitung, Objekterkennung und dem gezielten Greifen von Objekten. Ein Roboter mit ähnlichen Aufgaben wurde schon vom V4R Team im SQUIRREL Projekt entwickelt und heißt Kenny.
FUNDING:
Company Funding
23.10.2019 Aeolus
The goal of the project with Aeolus is to advance current robotic capabilities to pick up unknown objects in conditions of clutter and fetching known objects, with emphasis on the diversity of objects addressed, and on the reliability of grasping. During object pick-up, the robot may not need to maintain a constraint on the pose of grasped objects, while for fetching known objects includes delivering them to a human user while maintaining constraints on object pose. Part of the project is also to acquire object models through interaction with a person, finding, remembering and updating the location of objects in a home-like environment, and physically executing the fetch and object transfer.
FUNDING:
Company Funding
09.10.2019 InDex
Robot In-hand Dexterous manipulation by extracting data from human manipulation of objects to improve robotic autonomy and dexterity
The InDex project aims to understand how humans perform in-hand object manipulation and to replicate the observed skilled movements with dexterous artificial hands, merging the concepts of deep reinforcement and transfer learning to generalise in-hand skills for multiple objects and tasks. In addition, an abstraction and representation of previous knowledge will be fundamental for the reproducibility of learned skills to different hardware. Learning will use data across multiple modalities that will be collected, annotated, and assembled into a large dataset. The data and our methods will be shared with the wider research community to allow testing against benchmarks and reproduction of results. The core objectives are: (i) to build a multi-modal artificial perception architecture that extracts data of object manipulation by humans; (ii) the creation of a multimodal dataset of in-hand manipulation tasks such as regrasping, reorienting and finely repositioning; (iii) the development of an advanced object modelling and recognition system, including the characterisation of object affordances and grasping properties, in order to encapsulate both explicit information and possible implicit object usages; (iv) to autonomously learn and precisely imitate human strategies in handling tasks; and (v) to build a bridge between observation and execution, allowing deployment that is independent of the robot.
FUNDING:
The project is funded by FWF – Austrian Science Foundation & CHIST-ERA.


09.10.2019 HEAP
Human-Guided Learning and Benchmarking of Robotic Heap Sorting
In HEAP we focus on advancing the state-of-the-art for sorting a heap of unknown, irregular objects and provide appropriate benchmarks. In our scenarios, we deal with unknown, broken or deformed object instances such as concrete, metal pipes and other plastic/metal parts of possibly complex shape. A major goal of this project is to make challenging manipulation tasks easily accessible and reproducible, and to allow for a comparative evaluation of different approaches using a standardized robotic platform and an open source simulation framework. Our intention in providing such a benchmark framework is to (i) evaluate state-of-the-art grasping and manipulation algorithms in these complex heap sorting setups and (ii) to define new challenges in terms of object recognition and manipulation that need to be solved by the community.
FUNDING:
The project is funded by FWF – Austrian Science Foundation & CHIST-ERA.
04.10.2019 BURG
Benchmarks for Understanding Grasping
In the BURG Project we set out to boost grasping research by focusing on complete tasks and the related object manipulation constraints. In doing so, we need to move from objects to parts, since object parts facilitate the interpretable usage of objects. Parts are essential to know how and where the gripper can grasp given the constraints imposed by the task, e.g., pouring from a container implies grasping from the side. The novelty will come from learning to predict plausible grasps and to link grasps to the parts responsible for selecting each of them. In BURG we will boost grasping research by focusing on complete tasks and the related object manipulation constraints. In doing so, we need to move from objects to parts (Fig. 1), since object parts facilitate the interpretable usage of objects. Parts are essential to know how and where the gripper can grasp given the constraints imposed by the task, e.g., pouring from a container implies grasping from the side. The novelty will come from learning to predict plausible grasps and to link grasps to the parts responsible for selecting each of them.
FUNDING:
The project is funded by FWF – Austrian Science Foundation & CHIST-ERA.
05.11.2018 RoboCoop
Robotics Education driven by Interregional Cooperation
In Schulen und Universitäten gibt es derzeit einen Mangel an Interesse an den MINT‐Fächern (Mathematik, Informatik, Naturwissenschaft und Technik) und an hierfür gut ausgebildeten Lehrkräften in Österreich und der Slowakei. Besonders Frauen sind in den MINT‐Bereichen deutlich unterrepräsentiert. Dies führt zu Engpässen auf dem Arbeitsmarkt, obwohl in der gesamten Region eine steigende Nachfrage nach MINT‐Personal besteht. Robotik in der Bildung hat sich als wertvolles Werkzeug für praktisches Lernen erwiesen, nicht nur für die Robotik selbst, sondern allgemein für MINT‐Themen. RoboCoop ist ein einzigartiges Projekt mit dem Ziel das multidisziplinäre Potenzial der Robotik zu nutzen und grenzüberschreitende Bildungsaktivitäten zu etablieren, um das Interesse an den MINT‐Themen zu wecken.
In RoboCoop werden mehr als 4000 SchülerInnen, Studierende und innovative MINT PädagogInnen auf interregionaler Ebene ermutigt und engagiert, um als positives Beispiel für den breiteren Einsatz auf nationaler Ebene in den beiden Ländern zu dienen. Dazu werden am ACIN Workshops, in denen SchülerInnen die Welt der Roboter kennenlernen und deren Kreativität und Gruppenarbeit gefördert wird, abgehalten. Das didaktische Konzept wechselt zwischen instruktiven und konstruktiven Elementen. Darüber hinaus soll eine umfassende quantitative und qualitative Evaluierung aller Projektaktivitäten zu politischen Empfehlungen führen, um eine systematische und langfristige Umsetzung der Projektideen zu gewährleisten und somit zu einer baldigen Einführung von Robotikthemen auf der Sekundarstufe führen.
Partners:
TU Wien – Fakultät für Elektrotechnik und Informationstechnik
ACIN Institut für Automatisierungs- und Regelungstechnik
PRIA – Practical Robotics Institute Austria
SSR Wien – Stadtschulrat Wien
SUK – Slovak University of Technology in Bratislava
CVTI SR – Slovak Centre of Scientific and Technical Information
FUNDING:
Dieses Projekt wird im Rahmen des Kooperationsprogrammes Interreg V-A SK-AT unter der Projektnummer V212 finanziert


24.11.2017 iBridge
Beim Projekt iBridge handelt es sich um ein generationsübergreifendes Projekt, dass die Steigerung des Interesses von Kindern und Jugendlichen an Forschung in sozial- und kulturübergreifenden Szenarien, an Technologie und Innovation sowie einer Vertiefung des Bezugs zu Naturwissenschaft und Technik durch das Thema Robotik in der Altenpflege zum Ziel hat. Um das Interesse der Kinder und Jugendlichen am Thema Robotik zu wecken, kommt das innovative Konzept des „sensitiven Kuscheltieres“ zum Einsatz, von dem dann über die Programmierung von Servicerobotern auf Robotik in der Altenpflege. Auf der anderen Seite des Altersspekturms bemühen sich HTL-SchülerInnen durch PC/Internetkurse in Pensionsitenklubs der Stadt Wien der älteren Generation im Zugang zu modernen Technologien zu unterstützen und achten dabei auf die Bedürfnisse dieser Generation.
28.08.2017 Modellierung und optimale Regelung von elektrischen Motoren mit redundanten Wicklungssystemen
Projektschwerpunkte
- Modellierung von PMSM mit redundanten Statorwicklungen
- Detektion von Fehlern der PMSM
- Optimale fehlertolerante Regelungsstrategien für PMSM mit redundanten Statorwicklungen
Beschreibung
Permanentmagnet-Synchronmaschinen (PMSM) werden aufgrund ihrer hohen Leistungsdichte in vielen industriellen und automotiven Anwendungen eingesetzt. In einigen dieser Anwendung (z.B. elektrische Servolenksysteme) kann ein Fehler des Motors (z.B. Kurzschluss von Statorwicklungen oder Kabelbruch), des Inverters oder der Sensorik (Positions- und Stromsensorik) zu einem unerwünschten und potenziell gefährlichen Verhalten führen. Um einen sicheren Betrieb der PMSM auch im Fehlerfall zu gewährleisten, wurden Konstruktionen mit redundanten Statorwicklungen und Inverterzweigen in der Literatur vorgeschlagen, siehe, z.B., Fig. 1. Die große Anzahl von möglichen Motorkonstruktionen beruht immer auf der Grundidee, mehr als drei Statorwicklungen zu verwenden die durch unabhängige Inverterzweige angesteuert werden. Dies ermöglicht den Betrieb der PMSM im Fall eines einzelnen Fehlers, wenngleich eventuell mit verringerter Leistung. Verwendet man zusätzlich eine Positionsschätzung für die PMSM, so kann die PMSM auch im Fall eines Fehlers des Positionssensors betrieben werden.
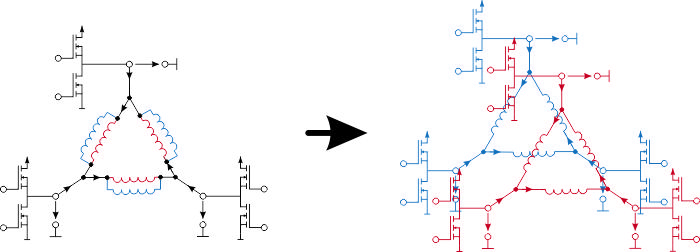
Aufbau von Statorwicklungen mit einem Dreiphasen-Wicklungssystem und zwei Dreiphasen-Wicklungssysteme
Die Mehrzahl der bekannten fehlertoleranten Regelungsstrategien und sensorlosen Positionsschätzmethoden basieren auf einem magnetisch linearen Grundwellenmodell der PMSM in dq-Darstellung. In dieser Forschungskooperation mit der Firma Robert Bosch GmbH werden Strategien zur Fehlerdetektion, zum fehlertoleranten Betrieb sowie für die optimale (sensorlose) Regelung von Permanentmagnet-Synchronmotoren entwickelt, die eine systematische Berücksichtigung der magnetischen Sättigung sowie von beliebigen Feldverläufen erlauben. Die Basis für diese Methoden bildet eine Beschreibung der PMSM mit Hilfe von Reluktanznetzwerken, welche zu Modellen mit geringer Komplexität führt, die besonders für die Systemanalyse und den Reglerentwurf geeignet sind. Die betrachteten Anwendungen der resultierenden Schätz- und Regelungsstrategien liegen in automotiven Anwendungen, wie z.B. elektrische Servolenksysteme oder elektrischen Antriebsstränge.
Projektpartner
25.08.2017 Modellierung und Regelung von Spritzgießmaschinen
Projektschwerpunkte
- Modellbasierter Entwurf von optimalen Regelungsstrategien für die Einspritz- und Nachdruckphase
- Modellbasierte Regelung der Temperaturverteilung in der Spritzgießmaschine
- Anwendung für Spritzgießmaschinen mit hydraulischem Direktantrieb
Beschreibung
Spritzgießen ist das am weitesten verbreitete Produktionsverfahren zum Erzeugen von Bauteilen aus Kunststoff. Dabei wird Kunststoffgranulat in einer Spritzgießmaschine durch Erwärmung und Deformation mit Hilfe einer Förderschnecke verflüssigt. Der flüssige Kunststoff sammelt sich im Schneckenvorraum. Wird die Schnecke nach vorne bewegt, so fließt der flüssige Kunststoff aus dem Schneckenvorraum und die Form wird gefüllt. Wenn der Kunststoff in der Form hinreichend abgekühlt ist, dann kann das fertige Kunststoffteil entnommen werden und der Prozess beginnt von vorne.

Foto einer Spritzgießmaschine
Eine wesentliche Grundlage zur Gewährleistung einer gleichmäßig hohen Produktqualität ist eine hohe Stabilität des Einspritzprozesses von einem Einspritzvorgang zum nächsten. Die wesentlichen Prozessgrößen sind hierbei die Temperaturen, die Einspritzgeschwindigkeiten sowie die Einspritzdrücke. Um diese Prozessgrößen möglichst genau und reproduzierbar vorzugeben, sind geeignete Regelungsstrategien notwendig. In dieser Forschungskooperation mit der Firma Engel werden optimale Regelungsstrategien für die Einspritzregelung (Geschwindigkeit, Druck) sowie die Temperaturregelung für Spritzgießmaschinen entwickelt. Ein Schwerpunkt liegt dabei auf hydraulisch aktuierten Spritzgießmaschinen mit Direktantrieb (Servopumpe), die sich durch eine verbesserte energetische Effizienz im Vergleich zu hydraulischen Spritzgießmaschinen mit Ventilsteuerung auszeichnen. Die Regelung für diese Bauform von Spritzgießmaschinen wird jedoch dadurch erschwert, dass die Dynamik der Aktorik wesentlich geringer ist.
Projektpartner
24.08.2017 Modellierung und optimale Regelung von Permanentmagnet-Synchronmotoren
Projektschwerpunkte
- Reluktanzmodellierung von Permanentmagnet-Synchronmotoren (PMSM)
- Systematische Berücksichtigung von magnetischer Sättigung und nicht-sinusförmiger Feldverläufe
- Optimale Regelung des Moments
- Sensorlose Verfahren zur Positionsbestimmung von PMSM
Beschreibung
Permanentmagnet-Synchronmotoren (PMSM) werden in vielen industriellen Anwendungen, wie z.B. der Robotik, aufgrund ihrer hohen Momentendichte und hohen energetischen Effizienz eingesetzt. Für die Regelung von PMSM ist die feldorientierte Regelung industrieller Standard. Diese Regelungsstrategie beruht auf einer Transformation der winkelabhängigen Größen des PMSM auf ein mit dem Rotor fest verbundenes orthogonales dq0-Koordinatensystem. Wesentliche Annahme ist dabei die magnetische Linearität des Motors sowie eine Grundwellenapproximation der Feldgrößen des Motors.
Moderne Motorkonstruktionen verwenden meist Einzelzahnspulen und einen nicht homogenen Luftspalt, wodurch die Annahme sinusförmigen Verläufe mehr oder weniger verletzt ist. Weiterhin werden PMSM häufig bis in den Bereich maßgeblicher Sättigung betrieben. Damit sind die Annahmen der klassischen feldorientierten Regelung in vielen Anwendungen mehr oder weniger verletzt.
In dieser Forschungskooperation mit der Firma Bernecker und Rainer Industrieelektronik GmbH (B&R) werden Methoden zur systematischen mathematischen Beschreibung von PMSM mit ausgeprägter Sättigung sowie nicht sinusförmigen Feldgrößen untersucht. Dazu wird die Methode der Reluktanzmodellierung angewandt, bei der der magnetische Kreis des PMSM mit einer Verschaltung von magnetischen Widerständen (Reluktanzen) und magnetischen Spannungsquellen (Spulen, Permanentmagnete) approximiert wird, siehe Abb. 1.
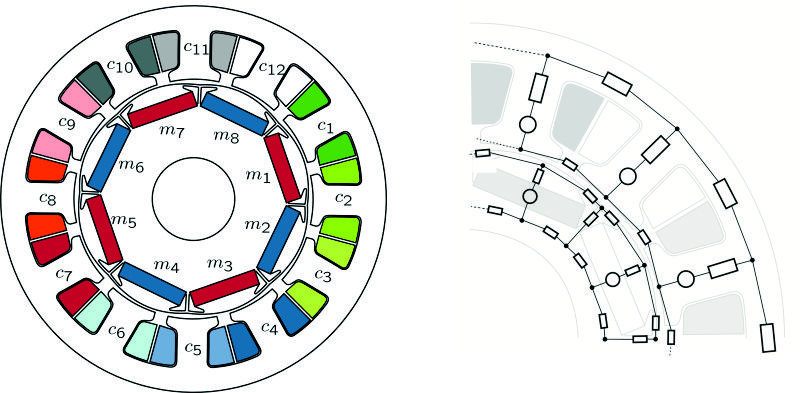
Schnitt und mögliche Reluktanzmodellierung eines typischen PMSM
Die Anwendung der aus der elektrischen Schaltungstechnik bekannten Netzwerkstheorie erlaubt eine systematische Bestimmung der Modellgleichungen für beliebige Motorkonstruktionen mit relativ komplexen Reluktanznetzwerken, siehe z.B. Fig. 2. Weiterhin können damit systematisch magnetische Sättigung und nicht sinusförmige Feldgrößen berücksichtigt werden.
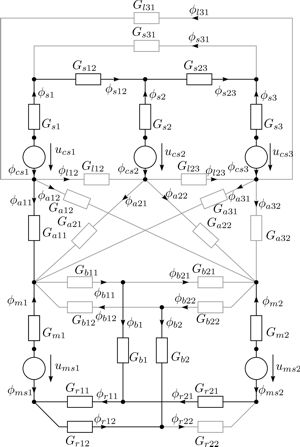
Reluktanznetzwerk eines typischen PMSM
Da sich diese Modelle auch durch eine relativ geringe Modellkomplexität auszeichnen, sind diese Modelle eine gute Basis für modellbasierte Regelungsstrategien. Im Rahmen dieses Forschungsprojektes werden optimierungsbasierte Regelungsstrategien entwickelt, die z.B. eine indirekte Momentenregelung mit gleichzeitiger Minimierung der Verluste des PMSM erlauben. Damit lässt sich eine wesentliche Verbesserung der Momentenregelgüte im Vergleich zu einer klassischen feldorientierten Regelungsstrategie erreichen, siehe z.B. Abb. 3.
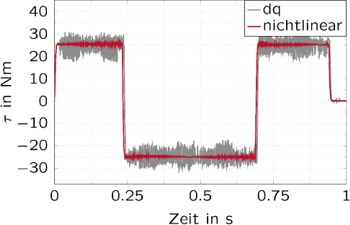
Momentenregelgüte der entwickelten nichtlinearen Regelungsstrategie im Vergleich zu einer feldorientierten Regelung (dq)
Der modellbasierte Ansatz erlaubt die einfache Übertragung auf andere Baugrößen und Bauformen von elektrischen Motoren. Insbesondere lassen sich die Ergebnisse auch auf Linearmotoren übertragen. Weiterhin bilden die mathematischen Modelle eine gute Basis auch für die sensorlose Positionsbestimmung von PMSM.
Ausgewählte Publikationen
- D. Faustner, W. Kemmetmüller, and A. Kugi, Flatness-Based Torque Control of Saturated Surface-Mounted Permanent Magnet Synchronous Machines, IEEE Transactions on Control Systems Technology, vol. 24, iss. 4, p. 1201–1213, 2016.
[BibTex] [Download]@Article{Faustner16, Title = {Flatness-Based Torque Control of Saturated Surface-Mounted Permanent Magnet Synchronous Machines}, Author = {Faustner, D. and Kemmetm{\"u}ller, W. and Kugi, A.}, Journal = {IEEE Transactions on Control Systems Technology}, Pages = {1201--1213}, Volume = {24}, Year = {2016}, Number = {4}, Doi = {10.1109/TCST.2015.2501345}, ISSN = {1063-6536}, } - D. Faustner, W. Kemmetmüller, and A. Kugi, Experimental Parameterization of a Design Model for Flatness-Based Torque Control of a Saturated Surface-Mounted PMSM, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems & 15th Mechatronics Forum International Conference, Loughborough, UK, 2016, p. 575–582.
[BibTex]@InProceedings{Faustner16a, author = {Faustner, D. and Kemmetm\"uller, W. and Kugi, A.}, title = {Experimental Parameterization of a Design Model for Flatness-Based Torque Control of a Saturated Surface-Mounted PMSM}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems \& 15th Mechatronics Forum International Conference}, year = {2016}, volume = {49}, number = {21}, month = {9}, pages = {575--582}, doi = {10.1016/j.ifacol.2016.10.663}, address = {Loughborough, UK}, issn = {2405-8963}, } - D. Faustner, W. Kemmetmüller, and A. Kugi, Magnetic Equivalent Circuit Modeling of a Saturated Surface-Mounted Permanent Magnet Synchronous Machine, in Proceedings of the 8th Vienna International Conference on Mathematical Modelling (MATHMOD), Vienna, Austria, 2015, p. 360–365.
[BibTex]@InProceedings{Faustner15, author = {Faustner, D. and Kemmetm\"uller, W. and Kugi, A.}, title = {Magnetic Equivalent Circuit Modeling of a Saturated Surface-Mounted Permanent Magnet Synchronous Machine}, booktitle = {Proceedings of the 8th Vienna International Conference on Mathematical Modelling (MATHMOD)}, year = {2015}, month = {2}, pages = {360--365}, doi = {10.1016/j.ifacol.2015.05.033}, address = {Vienna, Austria}, } - D. Faustner, W. Kemmetmüller, and A. Kugi, Field Weakening in Flatness-Based Torque Control of Saturated Surface-Mounted Permanent Magnet Synchronous Machines, in Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, Australia, 2015, p. 858–863.
[BibTex]@InProceedings{Faustner15a, author = {Faustner, D. and Kemmetm\"uller, W. and Kugi, A.}, title = {Field Weakening in Flatness-Based Torque Control of Saturated Surface-Mounted Permanent Magnet Synchronous Machines}, booktitle = {Proceedings of the 2015 IEEE Conference on Control Applications (CCA)}, year = {2015}, publisher = {IEEE}, month = {9}, pages = {858--863}, doi = {10.1109/CCA.2015.7320725}, address = {Sydney, Australia}, } - W. Kemmetmüller, D. Faustner, and A. Kugi, Optimale Nichtlineare Regelung von permantenterregten Synchronmaschinen, at – Automatisierungstechnik, vol. 63, iss. 9, p. 739–750, 2015.
[BibTex] [Download]@Article{Kemmetmueller15a, Title = {Optimale Nichtlineare Regelung von permantenterregten Synchronmaschinen}, Author = {Kemmetm\"uller, W. and Faustner, D. and Kugi, A.}, Journal = {at -- Automatisierungstechnik}, Pages = {739--750}, Volume = {63}, Year = {2015}, Number = {9}, Doi = {10.1515/auto-2015-0041}, } - W. Kemmetmüller, D. Faustner, and A. Kugi, Optimal torque control of permanent magnet synchronous machines using magnetic equivalent circuits, Mechatronics, vol. 32, p. 22–33, 2015.
[BibTex] [Download]@Article{Kemmetmueller15b, Title = {Optimal torque control of permanent magnet synchronous machines using magnetic equivalent circuits}, Author = {Kemmetm\"uller, W. and Faustner, D. and Kugi, A.}, Journal = {Mechatronics}, Pages = {22--33}, Volume = {32}, Year = {2015}, Doi = {10.1016/j.mechatronics.2015.10.007}, ISSN = {0957-4158}, } - W. Kemmetmüller, D. Faustner, and A. Kugi, Modeling of a permanent magnet synchronous machine with internal magnets using magnetic equivalent circuits, IEEE Transactions on Magnetics, vol. 50, iss. 6, 2014.
[BibTex] [Download]@Article{Kemmetmueller14, Title = {Modeling of a permanent magnet synchronous machine with internal magnets using magnetic equivalent circuits}, Author = {Kemmetm{\"u}ller, Wolfgang and Faustner, David and Kugi, Andreas}, Journal = {IEEE Transactions on Magnetics}, Volume = {50}, Year = {2014}, Number = {6}, Doi = {10.1109/TMAG.2014.2299238}, }