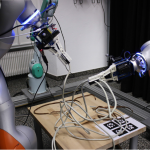
HEAP2019 - 2022
In HEAP we focus on advancing the state-of-the-art for sorting a heap of unknown, irregular objects and provide appropriate benchmarks. Weiterlesen →

BURG2019 - 2022
In the BURG Project we set out to boost grasping research by focusing on complete tasks and the related object manipulation constraints. Weiterlesen →
RoboCoop2018 - 2022
Das Projekt soll das Interesse junger Menschen an MINT-Fächern erwecken, um den derzeitigen Mangel in diesen Bereichen zu decken. Unter anderem werden Workshops angeboten, in welchen SchülerInnen die Möglichkeit geboten wird, Roboter kennen zu lernen. Weiterlesen →
iBridge2017 - 2019
Beim Projekt iBridge handelt es sich um ein generationsübergreifendes Projekt, dass die Steigerung des Interesses von Kindern und Jugendlichen an Forschung in sozial- und kulturübergreifenden Szenarien, an Technologie und Innovation sowie einer Vertiefung des Bezugs zu Naturwissenschaft und Technik durch das Thema Robotik in der Altenpflege zum Ziel hat. Weiterlesen →
MMAssist II2017 - 2020
Ziel in MMAssist II ist es, das Wesen und die Charakteristik von Assistenz im Produktionskontext grundlegend zu untersuchen, daraufhin optimierte Assistenzsysteme für zukunftsweisende auf Menschen fokussierte Arbeitsplätze ("Human-Centered Workplace") zu entwickeln, diese in industriellen Umgebungen experimentell umzusetzen und zu evaluieren. Weiterlesen →

RALLI2016 - 2019
Zukünftige soziale Roboter, die im Alltag eingesetzt werden sollen, benötigen die Fähigkeit, neue Aufgaben durch Beobachtung und Sprachinstruktionen zu meistern, insbesondere als nicht alle Umgebungsfaktoren und Eventualitäten vorimplementiert werden können. Daher beschäftigt sich RALLI mit dem Lernen neuer Aktionen in Verbindung mit entsprechenden sprachlichen Äußerungen. Weiterlesen →
ACROSSING2016 - 2019
ACROSSING is an innovative research training network funded by the EU H2020 Marie Sklodowska-Curie Actions programme which aims to change the way millions of the older people in Europe live and maintain wellbeing. The project aims to make a critical contribution towards an open smart home technology infrastructure by interlinking disciplines from sensing technologies, context inferences and interaction and considering key principles of social impact, ethics, security and privacy. Weiterlesen →
RoboFit2016 - 2019
Im Projekt RoboFit besuchen uns Klassen (von Vorschulalter bis Oberstufe), um einen Vortrag über Robotik zu hören, bei einem kurzen Workshop sich an Roboternavigation zu versuchen, und um eine Demo unserer Roboter Romeo oder Pepper zu sehen. Weiterlesen →
AssistMe2015 - 2017
AssistMe develops and evaluates during a user-centered multistage process innovative means of interaction for programming and usage of a robot-based assistive system. Central topic is the integration of users in the concept development where the interaction paradigms are defined as well as in the evaluation stage of the developed technology. Weiterlesen →
ALOOF2015 - 2017
ALOOF wird es Robotern ermöglichen die Bedeutung von Objekten zu erlernen die sie noch nie zuvor gesehen haben. Dabei wird das stetig wachsende Wissen aus den Erfahrungen des Roboters und des Webs in einer für situierte Umgebungen geeigneten Wissensrepräsentation nutzbar gemacht. Durch gezielte Suche im Web werden Roboter lernen welche spezifischen Eigenschaften Objekte haben, oder an welchen Orten man diese üblicherweise finden kann. Um dies zu ermöglichen brauchen Roboter einen Mechanismus der es Ihnen ermöglicht Wissen aus Erfahrung und Wissen aus dem Web zu fusionieren. Weiterlesen →