24.08.2017 Modeling and control of hydraulic drive systems
Project focus
- Mathematical modeling of hydraulic systems, in particular of axial piston pumps
- Adaptive nonlinear control of axial piston pumps
- Optimal model-predictive control strategies for axial piston pumps
- Application to a hydraulic hybrid drive train
Description
Hydraulic drive systems are widely spread in many industrial applications. This results from their high power density while featuring a small size and weight. The control of hydraulic systems is typically performed by means of valves, which allow to reach very fast dynamics of the closed loop system. However, utilizing valves to control hydraulic systems also incorporates relatively large energy losses.
To increase the energy efficiency, variable displacement pumps and motors are considered in this research project. In particular, axial piston pumps with swash plates are considered, which allow for a continuous and fast change of the volume flow by tilting the swash plate, cf. Fig. 1. Optimal control strategies for the swash plate angle are developed in a research cooperation with Robert Bosch GmbH, which are the basis for a control of the volume flow, the pressure or the torque of the machine.
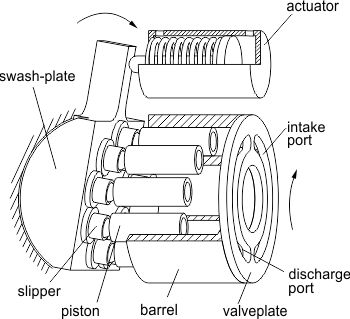
Schematics of an axial piston machine
One challenge for the design of control strategies for axial piston pumps are the pronounced nonlinear behavior of the system and fast changing external loads. A nonlinear adaptive control strategy, including an estimation strategy for the unknown load, was developed for axial piston pumps with fast changing loads. Furthermore, nonlinear model-predictive control strategies are developed to allow for a systematic incorporation of the nonlinearities and constraints of the system. The internal, non-measurable states, which are necessary in the control strategies, are obtained by a nonlinear estimation strategy. It has already been shown that it is possible to implement such a nonlinear model-predictive control strategy in real-time with a sampling time of 1 ms on an industrial real-time hardware.

Test bench for the test of the adaptive nonlinear control strategy
Based on the optimal control of the swash plate angle, extended control strategies e.g. for the rotational speed of the axial piston machine are developed. A possible application, which was considered in a research cooperation with Robert Bosch GmbH, is a hydraulic hybrid drive train, see Fig. 3. This system comprises an internal combustion engine and a hydraulic drive train with two axial piston machines (APU). To regenerate brake energy, oil can be stored in a hydraulic piston accumulator. In this research project, mathematical models for the system and estimation strategies for the state of charge of the piston accumulator were developed. Moreover, an optimal (model-predictive) control strategy was proposed for certain configurations of the drive train, which allow to accurately follow the driver’s demand while minimizing the energy losses at the same time.
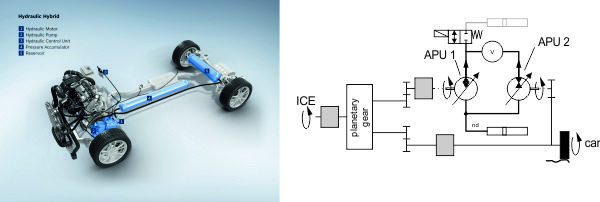
Sketch of a hydraulic hybrid drive system (c) Robert Bosch GmbH
Selected publications
- P. Zeman, W. Kemmetmüller, and A. Kugi, Nonlinear Model Predictive Control of Axial Piston Pumps, Journal of Dynamic Systems, Measurement, and Control, vol. 139, iss. 8, p. 081008-1–081008-11, 2017.
[BibTex]@Article{Zeman17, Title = {Nonlinear Model Predictive Control of Axial Piston Pumps}, Author = {Zeman, P. and Kemmetm\"uller, W. and Kugi, A.}, Journal = {Journal of Dynamic Systems, Measurement, and Control}, Pages = {081008-1--081008-11}, Volume = {139}, Year = {2017}, Number = {8}, Doi = {10.1115/1.4035608}, ISSN = {0022-0434}, } - P. Zeman, W. Kemmetmüller, and A. Kugi, Energy-efficient Constrained Control of a Hydrostatic Power Split Drive, in Proceedings of the 20th IFAC World Congress, Toulouse, France, 2017, p. 4775–4780.
[BibTex]@InProceedings{Zeman17a, author = {Zeman, P. and Kemmetm\"uller, W. and Kugi, A.}, title = {Energy-efficient Constrained Control of a Hydrostatic Power Split Drive}, booktitle = {Proceedings of the 20th IFAC World Congress}, year = {2017}, volume = {50}, number = {1}, month = {7}, pages = {4775--4780}, doi = {10.1016/j.ifacol.2017.08.959}, address = {Toulouse, France}, issn = {2405-8963}, } - A. Pfeffer, T. Glück, W. Kemmetmüller, and A. Kugi, Mathematical modelling of a hydraulic accumulator for hydraulic hybrid drives, Mathematical and Computer Modelling of Dynamical Systems, vol. 22, iss. 5, p. 397–411, 2016.
[BibTex] [Download]@Article{Pfeffer16, Title = {Mathematical modelling of a hydraulic accumulator for hydraulic hybrid drives}, Author = {Pfeffer, A. and Gl\"uck, T. and Kemmetm\"uller, Wolfgang and Kugi, Andreas}, Journal = {Mathematical and Computer Modelling of Dynamical Systems}, Pages = {397--411}, Volume = {22}, Year = {2016}, Number = {5}, Doi = {10.1080/13873954.2016.1174716}, ISSN = {1387-3954}, } - P. Zeman, W. Kemmetmüller, and A. Kugi, Model Predictive Speed Control of Axial Piston Motors, in Proceedings of the 10th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2016), Monterey, USA, 2016, p. 772–777.
[BibTex]@InProceedings{Zeman16, author = {Zeman, P. and Kemmetm\"uller, W. and Kugi, A.}, title = {Model Predictive Speed Control of Axial Piston Motors}, booktitle = {Proceedings of the 10th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2016)}, year = {2016}, volume = {49}, number = {18}, month = {8}, pages = {772--777}, doi = {10.1016/j.ifacol.2016.10.259}, address = {Monterey, USA}, issn = {2405-8963}, } - A. Pfeffer, T. Glück, W. Kemmetmüller, and A. Kugi, State of Charge Estimator Design for a Hydro-Pneumatic Accumulator, Journal of Dynamic Systems, Measurement, and Control, vol. 137, iss. 6, p. 061014:1–061014:9, 2015.
[BibTex]@Article{Pfeffer15, Title = {State of Charge Estimator Design for a Hydro-Pneumatic Accumulator}, Author = {Pfeffer, A. and Gl\"uck, T. and Kemmetm\"uller, W. and Kugi, A.}, Journal = {Journal of Dynamic Systems, Measurement, and Control}, Pages = {061014:1--061014:9}, Volume = {137}, Year = {2015}, Number = {6}, Doi = {10.1115/1.4029407}, } - P. Zeman, W. Kemmetmüller, and A. Kugi, Mathematical Modeling and Analysis of a Hydrostatic Drive Train, in Proceedings of the 8th Vienna International Conference on Mathematical Modelling (MATHMOD), Vienna, Austria, 2015, p. 508–513.
[BibTex]@InProceedings{Zeman15, author = {Zeman, P. and Kemmetm\"uller, W. and Kugi, A.}, title = {Mathematical Modeling and Analysis of a Hydrostatic Drive Train}, booktitle = {Proceedings of the 8th Vienna International Conference on Mathematical Modelling (MATHMOD)}, year = {2015}, month = {2}, pages = {508--513}, doi = {10.1016/j.ifacol.2015.05.064}, address = {Vienna, Austria}, } - W. Kemmetmüller, F. Fuchshumer, and A. Kugi, Nonlinear pressure control of self-supplied variable displacement axial piston pumps, Control Engineering Practice, vol. 18, p. 84–93, 2010.
[BibTex] [Download]@Article{Kemmetmuller10, Title = {Nonlinear pressure control of self-supplied variable displacement axial piston pumps}, Author = {W. Kemmetm{\"u}ller and F. Fuchshumer and A. Kugi}, Journal = {Control Engineering Practice}, Pages = {84--93}, Volume = {18}, Year = {2010}, Doi = {10.1016/j.conengprac.2009.09.006}, }
Project partner
- Robert Bosch GmbH
- Development of efficient models to describe the flow in long pipelines
- Development of scalable, physics-based digital twins of pumped storage power plants
- Design of optimal (model-predictive) control strategies
- Analysis of the possibilities to estimate non-measureable quantities
- J. -F. Mennemann, L. Marko, J. Schmidt, W. Kemmetmüller, and A. Kugi, The spectral element method as an efficient tool for transient simulations of hydraulic systems, Applied Mathematical Modelling, vol. 54, p. 627–647, 2018.
[BibTex] [Download]@Article{Mennemann2018, author = {Mennemann, J.-F. and Marko, L. and Schmidt, J. and Kemmetm{\"u}ller, W. and Kugi, A.}, title = {{The spectral element method as an efficient tool for transient simulations of hydraulic systems}}, doi = {10.1016/j.apm.2017.10.010}, issn = {0307-904X}, pages = {627--647}, volume = {54}, journal = {Applied Mathematical Modelling}, year = {2018}, } - J. Schmidt, W. Kemmetmüller, and A. Kugi, Modeling and static optimization of a variable speed pumped storage power plant, Renewable Energy, vol. 111, p. 38–51, 2017.
[BibTex] [Download]@Article{Schmidt17, Title = {Modeling and static optimization of a variable speed pumped storage power plant}, Author = {Schmidt, J. and Kemmetm\"uller, W. and Kugi, A.}, Journal = {Renewable Energy}, Pages = {38--51}, Volume = {111}, Year = {2017}, Doi = {10.1016/j.renene.2017.03.055}, ISSN = {0960-1481}, } - J. -F. Mennemann, J. Schmidt, W. Kemmetmüller, and A. Kugi, Simulation von Welleneffekten in Pumpspeicherkraftwerken mit Hilfe der Spektral-Element-Methode, at – Automatisierungstechnik, vol. 64, iss. 8, p. 681–695, 2016.
[BibTex]@Article{Mennemann16, Title = {{Simulation von Welleneffekten in Pumpspeicherkraftwerken mit Hilfe der Spektral-Element-Methode}}, Author = {Mennemann, J.-F. and Schmidt, J. and Kemmetm{\"u}ller, W. and Kugi, A.}, Journal = {at -- Automatisierungstechnik}, Pages = {681--695}, Volume = {64}, Year = {2016}, Number = {8}, Doi = {10.1515/auto-2016-0061}, ISSN = {0178-2312}, } - J. Mennemann, J. Schmidt, W. Kemmetmüller, and A. Kugi, Anwendung der Spectral-Penalty-Methode zur effizienten Diskretisierung der Massen- und Impulsbilanzgleichungen in Rohrleitungssystemen von Pumpspeicherkraftwerken, in Tagungsband GMA-Fachausschuss 1.30 “Modellbildung, Identifikation und Simulation in der Automatisierungstechnik”, Anif/Salzburg, Austria, 2015, p. 56–95.
[BibTex]@InProceedings{Mennemann15, author = {Mennemann, Jan-Frederik and Schmidt, J. and Kemmetm\"uller, W. and Kugi, A.}, title = {{Anwendung der Spectral-Penalty-Methode zur effizienten Diskretisierung der Massen- und Impulsbilanzgleichungen in Rohrleitungssystemen von Pumpspeicherkraftwerken}}, booktitle = {Tagungsband GMA-Fachausschuss 1.30 "Modellbildung, Identifikation und Simulation in der Automatisierungstechnik"}, year = {2015}, month = {9}, isbn = {978-3-9815012-9-2}, pages = {56--95}, address = {Anif/Salzburg, Austria}, } - J. Schmidt, W. Kemmetmüller, and A. Kugi, Modellierung und Analyse eines Pumpspeicherkraftwerks mit drehzahlvariablem Generator, in Tagungsband GMA-Fachausschuss 1.30 “Modellbildung, Identifikation und Simulation in der Automatisierungstechnik”, Anif/Salzburg, Austria, 2014, p. 38–68.
[BibTex]@InProceedings{Schmidt14, author = {Schmidt, J. and Kemmetm\"uller, W. and Kugi, A.}, title = {Modellierung und {A}nalyse eines {P}umpspeicherkraftwerks mit drehzahlvariablem {G}enerator}, booktitle = {Tagungsband GMA-Fachausschuss 1.30 "Modellbildung, Identifikation und Simulation in der Automatisierungstechnik"}, year = {2014}, month = {9}, pages = {38--68}, address = {Anif/Salzburg, Austria}, } - L. Marko, J. -F. Mennemann, L. Jadachowski, W. Kemmetmüller, and A. Kugi, Early- and late-lumping observer designs for long hydraulic pipelines: Application to pumped-storage power plants, Int. Journal of Robust and Nonlinear Control, vol. 28, iss. 7, p. 2759–2779, 2018.
[BibTex]@Article{Marko2018, author = {Marko, L. and Mennemann, J.-F. and Jadachowski, L. and Kemmetm{\"u}ller, W. and Kugi, A.}, title = {{Early- and late-lumping observer designs for long hydraulic pipelines: Application to pumped-storage power plants}}, doi = {10.1002/rnc.4049}, issn = {1099-1239}, number = {7}, pages = {2759--2779}, volume = {28}, journal = {Int. Journal of Robust and Nonlinear Control}, year = {2018}, } - Continuum-mechanical modeling of electrorheological fluids
- Development and control of electrorheological valves
- Design, modeling and control of semi-active electrorheological suspension systems
- Implementation and test on test benches and in test vehicles
- W. Kemmetmüller, K. Holzmann, A. Kugi, and M. Stork, Electrorheological Semiactive Shock Isolation Platform for Naval Applications, IEEE/ASME Transactions on Mechatronics, vol. 18, iss. 5, p. 1437–1447, 2013.
[BibTex] [Download]@Article{Kemmetmuller13a, Title = {{{E}lectrorheological {S}emiactive {S}hock {I}solation {P}latform for {N}aval {A}pplications}}, Author = {W. Kemmetm{\"u}ller and K. Holzmann and A. Kugi and M. Stork}, Journal = {IEEE/ASME Transactions on Mechatronics}, Pages = {1437--1447}, Volume = {18}, Year = {2013}, Number = {5}, Doi = {10.1109/TMECH.2012.2203456}, } - M. Kamelreiter, W. Kemmetmüller, and A. Kugi, Digitally controlled electrorheological valves and their application in vehicle dampers, Mechatronics, vol. 22, iss. 5, p. 629–638, 2012.
[BibTex] [Download]@Article{Kamelreiter12, Title = {{Digitally controlled electrorheological valves and their application in vehicle dampers}}, Author = {M. Kamelreiter and W. Kemmetm\"uller and A. Kugi}, Journal = {Mechatronics}, Pages = {629--638}, Volume = {22}, Year = {2012}, Number = {5}, Doi = {10.1016/j.mechatronics.2012.02.002}, } - M. Kamelreiter, W. Kemmetmüller, and A. Kugi, Digitale Ansteuerung elektrorheologischer Ventile und deren Anwendung in einem Fahrzeugdämpfer, in Tagungsband Mechatronik 2011 Dresden, Dresden, Germany, 2011, p. 37–42.
[BibTex]@InProceedings{Kamelreiter11, author = {M. Kamelreiter and W. Kemmetm\"uller and A. Kugi}, title = {{D}igitale {A}nsteuerung elektrorheologischer {V}entile und deren {A}nwendung in einem {F}ahrzeugd\"ampfer}, booktitle = {Tagungsband Mechatronik 2011 Dresden}, year = {2011}, month = {3}, pages = {37--42}, address = {Dresden, Germany}, } - M. Kamelreiter, W. Kemmetmüller, and A. Kugi, Digital Control of Electrorheological Valves, in Proceedings of the 5th IFAC Symposium on Mechatronic Systems, Boston, USA, 2010, p. 640–645.
[BibTex] [Download]@InProceedings{Kamelreiter10, author = {M. Kamelreiter and W. Kemmetm{\"u}ller and A. Kugi}, title = {Digital Control of Electrorheological Valves}, booktitle = {Proceedings of the 5th IFAC Symposium on Mechatronic Systems}, year = {2010}, month = {9}, pages = {640--645}, doi = {10.3182/20100913-3-US-2015.00075}, address = {Boston, USA}, } - K. Holzmann, W. Kemmetmüller, A. Kugi, M. Stork, H. Rosenfeldt, and S. Schneider, Modeling and control of an off-road truck using electrorheological dampers, Journal of Physics: Conference Series, vol. 149, 012011, 2009.
[BibTex] [Download]@Article{Holzmann09, Title = {Modeling and control of an off-road truck using electrorheological dampers}, Author = {K. Holzmann and W. Kemmetm{\"u}ller and A. Kugi and M. Stork and H. Rosenfeldt and S. Schneider}, Journal = {Journal of Physics: Conference Series}, Volume = {149, 012011}, Year = {2009}, Doi = {10.1088/1742-6596/149/1/012011}, } - M. Kamelreiter, W. Kemmetmüller, A. Kugi, K. Holzmann, and M. Stork, Modellierung und Regelung eines Kleintransporters mit semi-aktiver Radaufhängung basierend auf elektrorheo-logischen Dämpfern, in Mechatronik 2009, Wiesloch, Germany, 2009, p. 413–420.
[BibTex]@InProceedings{Kamelreiter09, author = {M. Kamelreiter and W. Kemmetm{\"u}ller and A. Kugi and K. Holzmann and M. Stork}, title = {Modellierung und {R}egelung eines {K}leintransporters mit semi-aktiver {R}adaufh{\"a}ngung basierend auf elektrorheo-logischen {D}{\"a}mpfern}, booktitle = {Mechatronik 2009}, year = {2009}, month = {5}, pages = {413--420}, address = {Wiesloch, Germany}, } - K. Holzmann, W. Kemmetmüller, A. Kugi, M. Stork, H. Rosenfeldt, and S. Schneider, Modeling and control of an off-road truck using electrorheological dampers, in Proceedings 11th Conference on Electrorheological Fluids and Magnetorheological Suspensions, Dresden, Germany, 2008.
[BibTex]@InProceedings{Holzmann08, author = {K. Holzmann and W. Kemmetm{\"u}ller and A. Kugi and M. Stork and H. Rosenfeldt and S. Schneider}, title = {Modeling and control of an off-road truck using electrorheological dampers}, booktitle = {Proceedings 11th Conference on Electrorheological Fluids and Magnetorheological Suspensions}, year = {2008}, month = {8}, doi = {10.1088/1742-6596/149/1/012011}, address = {Dresden, Germany}, } - Fludicon GmbH
- Optimization of the setup (actuators, sensors) of a camera stabilization platform
- Attitude estimation strategy utilizing redundant inertial measurement units
- Design of a nonlinear attitude control strategy
- Implementation and test on a camera stabilization platform prototype
- F. Königseder, W. Kemmetmüller, and A. Kugi, Attitude Estimation Using Redundant Inertial Measurement Units for the Control of a Camera Stabilization Platform, IEEE Transactions on Control Systems Technology, vol. 24, iss. 5, p. 1837–1844, 2016.
[BibTex] [Download]@Article{Koenigseder16, Title = {Attitude Estimation Using Redundant Inertial Measurement Units for the Control of a Camera Stabilization Platform}, Author = {K{\"o}nigseder, F. and Kemmetm{\"u}ller, W. and Kugi, A.}, Journal = {IEEE Transactions on Control Systems Technology}, Pages = {1837--1844}, Volume = {24}, Year = {2016}, Number = {5}, Doi = {10.1109/TCST.2015.2510324}, ISSN = {1063-6536}, } - F. Königseder, W. Kemmetmüller, and A. Kugi, Modellierung und Regelung einer tragbaren Kamerastabilisierungsplattform, in Tagungsband Mechatronik 2013, Aachen, Germany, 2013, p. 99–104.
[BibTex]@InProceedings{Konigseder13, author = {F. K{\"o}nigseder and W. Kemmetm{\"u}ller and A. Kugi}, title = {{{M}odellierung und {R}egelung einer tragbaren {K}amerastabilisierungsplattform}}, booktitle = {Tagungsband Mechatronik 2013}, year = {2013}, month = {3}, pages = {99--104}, address = {Aachen, Germany}, } - Modeling, model verification and system analysis
- Observer and estimator design for the online and offline estimation of the cable capacity
- Design of a real-time capable control strategy
- Optimization of system parameters
- Implementation and test of the control and estimation strategies at a prototype
- S. Eberharter, W. Kemmetmüller, and A. Kugi, Analysis and System Optimization of a Very Low Frequency High-Voltage Test System, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems & 15th Mechatronics Forum International Conference, Loughborough, UK, 2016, p. 294–300.
[BibTex]@InProceedings{Eberharter16a, author = {Eberharter, S. and Kemmetm\"uller, W. and Kugi, A.}, title = {Analysis and System Optimization of a Very Low Frequency High-Voltage Test System}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems \& 15th Mechatronics Forum International Conference}, year = {2016}, volume = {49}, number = {21}, month = {9}, pages = {294--300}, doi = {10.1016/j.ifacol.2016.10.570}, address = {Loughborough, UK}, issn = {2405-8963}, } - W. Kemmetmüller, S. Eberharter, and A. Kugi, Controller design and experimental validation of a very low frequency high-voltage test system, Control Engineering Practice, vol. 37, p. 32–42, 2015.
[BibTex] [Download]@Article{Kemmetmueller15, Title = {Controller design and experimental validation of a very low frequency high-voltage test system}, Author = {Kemmetm\"uller, W. and Eberharter, S. and Kugi, A.}, Journal = {Control Engineering Practice}, Pages = {32--42}, Volume = {37}, Year = {2015}, Doi = {10.1016/j.conengprac.2014.12.011}, } - S. Eberharter, W. Kemmetmüller, and A. Kugi, Mathematical Modeling and Analysis of a Very Low Frequency HV Test System, IEEE Transactions on Power Electronics, vol. 29, iss. 11, p. 5784–5794, 2014.
[BibTex] [Download]@Article{Eberharter14, Title = {Mathematical Modeling and Analysis of a Very Low Frequency {HV} Test System}, Author = {Eberharter, S. and Kemmetm\"uller, W. and Kugi, A.}, Journal = {IEEE Transactions on Power Electronics}, Pages = {5784--5794}, Volume = {29}, Year = {2014}, Number = {11}, Doi = {10.1109/TPEL.2014.2299293}, } - W. Kemmetmüller, S. Eberharter, and A. Kugi, Quasi Optimal Feedforward Control of a Very Low Frequency High Voltage Test System, in Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 2014, p. 11623–11628.
[BibTex]@InProceedings{Kemmetmueller14a, author = {Kemmetm\"uller, W. and Eberharter, S. and Kugi, A.}, title = {Quasi Optimal Feedforward Control of a Very Low Frequency High Voltage Test System}, booktitle = {Proceedings of the 19th IFAC World Congress}, year = {2014}, month = {8}, pages = {11623--11628}, doi = {10.3182/20140824-6-ZA-1003.00356}, address = {Cape Town, South Africa}, } - W. Kemmetmüller and A. Kugi, Mathematische Modellierung und Analyse eines DRT-VLF-Hochspannungsprüfgenerators, e & i Elektrotechnik und Informationstechnik, vol. 129, iss. 1, p. 18–27, 2012.
[BibTex] [Download]@Article{Kemmetmuller12, Title = {{Mathematische Modellierung und Analyse eines DRT-VLF-Hochspannungspr\"ufgenerators}}, Author = {W. Kemmetm\"uller and A. Kugi}, Journal = {e {\&} i Elektrotechnik und Informationstechnik}, Pages = {18--27}, Volume = {129}, Year = {2012}, Number = {1}, Doi = {10.1007/s00502-012-0073-5}, } - Real-time implementation of optimization-based control methods
- Constrained model predictive control
- Path planning
- Path-following control
- Trajectory tracking control: The time evolution along the geometric path is fixed in advance. The controller has to achieve the tracking of the time-parameterized trajectory. This task was implemented in the CLIC-project (Closed-Loop Integration of Cognition, Communication and Control, 2009-2010). Another goal of this project was to generate a collision-free path based on information from a distributed image processing system in real-time. The integration of all components is carried out by means of a synchronous communication structure. Therefore, it is also possible to account for moving obstacles.
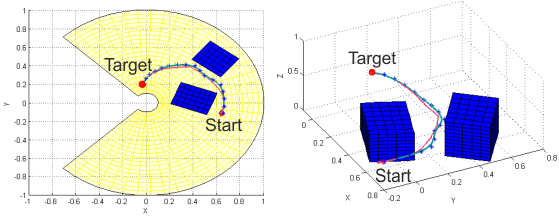
Trajectory tracking for collision avoidance, desired trajectory (green) vs. actual trajectory (red) of the crane hook.
The other partners in the CLIC-project were the Department of Computer Engineering (TU Wien), the Institute of Networked and Embedded Systems (Alpen-Adria-Universität Klagenfurt) and TTTech Computertechnik AG.
- Path-following control: Within this framework, the time evolution along the geometric path is left as a degree of freedom for the controller. This gives the possibility to prioritize the spatial tracking of the path compared to the overall time it takes to complete the traversal along the path. In the case of disturbances, this allows to correct the resulting deviations before the traversal of the path towards the end-point is continued.
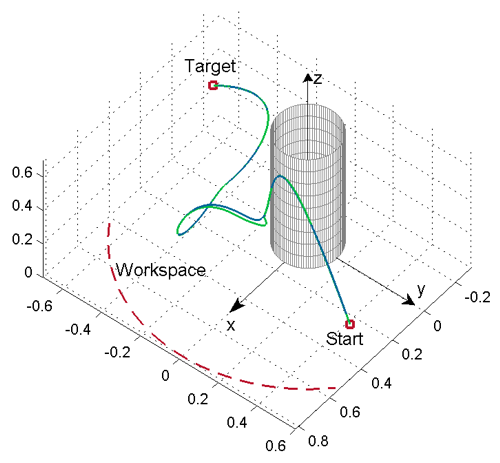
Path-following control with an external disturbance force acting on the crane hook, desired path (blue) vs. actual path (green) of the crane hook.
- M. Böck and A. Kugi, Real-time Nonlinear Model Predictive Path-Following Control of a Laboratory Tower Crane, IEEE Transactions on Control Systems Technology, vol. 22, iss. 4, p. 1461–1473, 2014.
[BibTex] [Download]@Article{Boeck14, Title = {Real-time Nonlinear Model Predictive Path-Following Control of a Laboratory Tower Crane}, Author = {B{\"o}ck, Martin and Kugi, Andreas}, Journal = {IEEE Transactions on Control Systems Technology}, Pages = {1461--1473}, Volume = {22}, Year = {2014}, Number = {4}, Doi = {10.1109/TCST.2013.2280464}, } - M. Böck and A. Kugi, Manifold Stabilization and Path-Following Control for Flat Systems with Application to a Laboratory Tower Crane, in Proceedings of the 53rd IEEE Conference on Decision and Control (CDC), Los Angeles, USA, 2014, p. 4529–4535.
[BibTex] [Download]@InProceedings{Boeck14b, author = {Martin B{\"o}ck and Andreas Kugi}, title = {Manifold Stabilization and Path-Following Control for Flat Systems with Application to a Laboratory Tower Crane}, booktitle = {Proceedings of the 53rd IEEE Conference on Decision and Control (CDC)}, year = {2014}, month = {12}, pages = {4529--4535}, doi = {10.1109/CDC.2014.7040096}, address = {Los Angeles, USA}, } - M. Egretzberger, K. Graichen, and A. Kugi, Flatness-Based MPC and Global Path Planning Towards Cognition-Supported Pick-and-Place Tasks of Tower Cranes, in Advanced Dynamics and Model-Based of Control Structures and Machines, H. Irschik, M. Krommer, and A. Belyaev, Eds., Wien: Springer, 2011, p. 63–72.
[BibTex]@Incollection{Egretzberger11e, Title = {Flatness-Based MPC and Global Path Planning Towards Cognition-Supported Pick-and-Place Tasks of Tower Cranes}, Author = {M. Egretzberger and K. Graichen and A. Kugi}, Booktitle = {Advanced Dynamics and Model-Based of Control Structures and Machines}, Publisher = {Springer}, Year = {2011}, Address = {Wien}, Editor = {H. Irschik and M. Krommer and A. Belyaev}, Pages = {63--72}, Doi = {10.1007/978-3-7091-0797-3_8}, } - K. Graichen, M. Egretzberger, and A. Kugi, Suboptimal model predictive control of a laboratory crane, in 8th IFAC Symposium on Nonlinear Control Systems (NOLCOS), Bologna, Italy, 2010, p. 397–402.
[BibTex]@InProceedings{Graichen10, author = {K. Graichen and M. Egretzberger and A. Kugi}, title = {Suboptimal model predictive control of a laboratory crane}, booktitle = {8th IFAC Symposium on Nonlinear Control Systems (NOLCOS)}, year = {2010}, pages = {397--402}, doi = {10.3182/20100901-3-IT-2016.00140}, address = {Bologna, Italy}, } - K. Graichen, M. Egretzberger, and A. Kugi, Ein suboptimaler Ansatz zur schnellen modellprädiktiven Regelung nichtlinearer Systeme, at – Automatisierungstechnik, vol. 58, p. 447–456, 2010.
[BibTex]@Article{Graichen10c, Title = {Ein suboptimaler {A}nsatz zur schnellen modellpr{\"a}diktiven {R}egelung nichtlinearer {S}ysteme}, Author = {K. Graichen and M. Egretzberger and A. Kugi}, Journal = {at -- Automatisierungstechnik}, Pages = {447--456}, Volume = {58}, Year = {2010}, Doi = {10.1524/auto.2010.0860}, } - Department of Computer Engineering (TU Wien)
- Institute of Networked and Embedded Systems (Alpen-Adria-Universität Klagenfurt)
- TTTech Computertechnik AG
- Time optimal process flow
- Visual position control
- Flexible production systems
- M. W. Hofmair, M. Melik-Merkumians, M. Böck, M. Merdan, G. Schitter, and A. Kugi, Patching process optimization in an agent-controlled timber mill, Journal of Intelligent Manufacturing, vol. 28, iss. 1, p. 69–84, 2017.
[BibTex] [Download]@Article{Hofmair14, Title = {Patching process optimization in an agent-controlled timber mill}, Author = {Hofmair, Matthias Wolfgang and Melik-Merkumians, Martin and B\"ock, M. and Merdan, M. and Schitter, G. and Kugi, A.}, Journal = {Journal of Intelligent Manufacturing}, Pages = {69--84}, Volume = {28}, Year = {2017}, Number = {1}, Doi = {10.1007/s10845-014-0962-z}, ISSN = {1572-8145}, } - M. W. Hofmair, Process Optimization and Control of a Patching Plant for Shuttering Panels, A. Kugi and K. Schlacher, Eds., Aachen: Shaker Verlag, 2016, vol. 32.
[BibTex]@Book{Hofmair16, Title = {Process Optimization and Control of a Patching Plant for Shuttering Panels}, Author = {Hofmair, M. W.}, Editor = {A. Kugi and K. Schlacher}, Publisher = {Shaker Verlag}, Year = {2016}, Address = {Aachen}, Series = {Modellierung und Regelung komplexer dynamischer Systeme}, Volume = {32}, ISBN = {978-3-8440-4745-5}, Organization = {Institute f{\"u}r Automatisierungs- und Regelungstechnik (TU Wien) und Regelungstechnik und Prozessautomatisierung (JKU Linz)}, } - M. W. Hofmair, M. Böck, and A. Kugi, Time-Optimal Trajectory Generation, Path Planning and Control for a Wood Patching Robot, in Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, Australia, 2015, p. 459–465.
[BibTex]@InProceedings{Hofmair15, author = {Hofmair, Matthias Wolfgang and B\"ock, Martin and Kugi, Andreas}, title = {Time-Optimal Trajectory Generation, Path Planning and Control for a Wood Patching Robot}, booktitle = {Proceedings of the 2015 IEEE Conference on Control Applications (CCA)}, year = {2015}, publisher = {IEEE}, month = {9}, pages = {459--465}, doi = {10.1109/CCA.2015.7320672}, address = {Sydney, Australia}, } - Lip Opazne Plosce Bohinj Doo (Slovenia)
- Lulea Tekniska Universitet (Sweden)
- MiCROTEC (Italy)
- Springer (Austria)
- Technische Universität München (Germany)
- TTTech (Austria)
- Project acronym: Hol-I-Wood PR
- Project title: Holonic Integration of Cognition, Communication and Control for a Wood Patching Robot
- Project number: 284573
- Optimal control of nonlinear MIMO systems
- Energy saving
- Experimental verification
- Production lines
- Handling systems
- A. Pfeffer, T. Glück, and A. Kugi, Soft Landing and Disturbance Rejection for Pneumatic Drives with Partial Position Information, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems & 15th Mechatronics Forum International Conference, Loughborough, UK, 2016, p. 559–566.
[BibTex] [Download]@InProceedings{Pfeffer16a, author = {Pfeffer, A. and Gl\"uck, T. and Kugi, A.}, title = {Soft Landing and Disturbance Rejection for Pneumatic Drives with Partial Position Information}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems \& 15th Mechatronics Forum International Conference}, year = {2016}, volume = {49}, number = {21}, month = {9}, pages = {559--566}, doi = {10.1016/j.ifacol.2016.10.661}, address = {Loughborough, UK}, issn = {2405-8963}, }
23.08.2017 Control of pumped storage power plants
Project focus
Description
Due to the increased implementation of renewable energy production (wind energy, solar plant), the amount of power plants with strongly fluctuating power production has significantly increased in the European electric grid. Thus, suitable storage systems are necessary to guarantee the stability of the electric grid. The most common way to store energy is given by pumped storage power plants, which basically comprise two water tanks which are connect by a pipeline and a turbine, cf. Fig. 1. In cases of excessive electric power in the electric distribution grid, water is pumped from the lower tank to the upper tank. Contrary, power can be supplied to the grid by transporting water from the upper tank via the turbine to the lower tank.

Typical setup of a pumped storage power plant
In this research project in cooperation with Andritz Hydro, control strategies for the optimal dynamical operation of pumped storage power plants are developed. Fixed speed (synchronous machine) and variable speed (doubly-fed induction machine or synchronous machine with a full-rated converter) plants are considered. A typical setup of a pumped storage power plant which utilizes doubly-fed induction machines (DFIM) is depicted in Fig. 2.
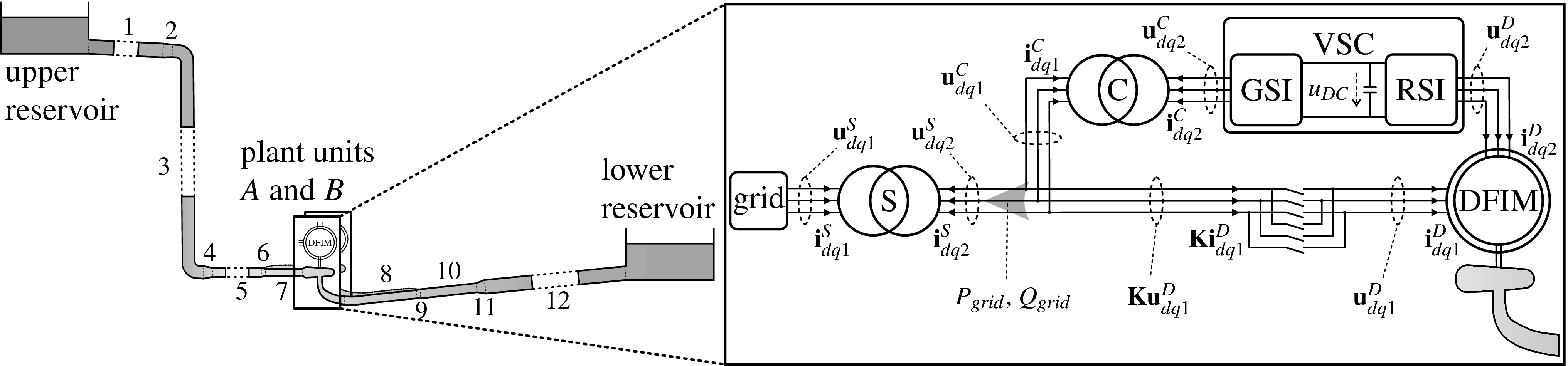
Components of a variable speed pumped storage power plant
A main difficulty for the dynamic control of pumped storage power plants are the long pipelines (in the range of up to several kilometers), which connect the turbines with the tanks. For fast changes of the turbine operation, this results in pressure waves (water hammer) which distribute along the pipelines and can result in a severe load (up to a damage) of the pipelines. Fig. 3 depicts a typical distribution of the pressure and volume flow at a pipeline for fast changes in the turbine operation point.
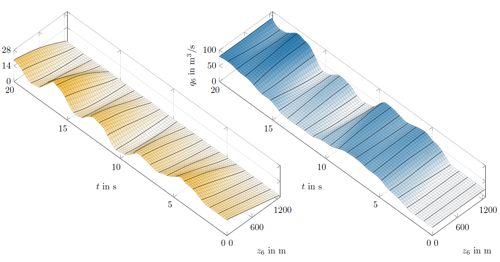
Spatial and time distribution of the pressure and volume flow in a pipeline
To take into account these effects, approximations of the infinite-dimensional equations describing this effect are developed. A focus is laid on methods, which allow for a very high numeric efficiency. This is important in particular for the utilization of the models in model based control strategies. Based on these models, optimal control strategies (model-predictive control) are examined. Based on these models and models of the electrical system, a scalable, physics based digital twin (including sensors and actuators) is developed. The physics based digital twin allows for easy adaptation to different topologies of pumped storage power plants (number of pipelines, types of turbines and generators, different elements in the electrical system, …). The digital twin is used for examination of optimal control strategies (model-predictive control). The main goal is to increase the dynamics of the closed-loop system (and thus the potential for the stabilization of grid variations) while keeping or increasing the energy efficiency of the power plant. Optimal open-loop control of high dynamic transients (e.g. load rejection) is also investigated.
Another focus of the project lies in the optimal power plant dispatching. One aspect is the optimal economic power plant utilization with day-ahead optimizations and control of short-time overloads in order to generate additional income during intraday trading in high volatile power grids. Another aspect is the power plant operation under minimal wear in order to extend the power plant lifespan.
Selected publications
Project partners and funding
22.08.2017 Electrorheological fluids
Project focus
Description
Classical hydraulics utilizes valves to change the volume flow in a hydraulic system. The basic operational principle is the adjustment of the flow path by means of the motion of a mechanical part, e.g. the valve spool. In contrast, electrorheological fluids (ERF) allow to directly influence their rheological properties (i.e. the apparent viscosity) by applying a sufficiently large electric field. This, in turn, allows to change the volume flow in a hydraulic circuit without any mechanical motion. Since the electrorheological effect is very fast (in the range of a few milliseconds), ERF can be utilized to build very fast hydraulic actuators. Furthermore, the resulting construction is kept very simple since there are no complicated mechanically moving parts.
In this research project, several applications in the field of valve constructions, linear actuators and automotive suspension systems, and shock absorbers in maritime applications were considered. The basis for all results was a detailed mathematical modeling of the ERF by means of a continuum mechanical model, which describes the stress as a function of the electric field strength and the shear rate. The characteristics of the shear stress as a function of shear rate is depicted in Fig. 1 for a typical ERF.
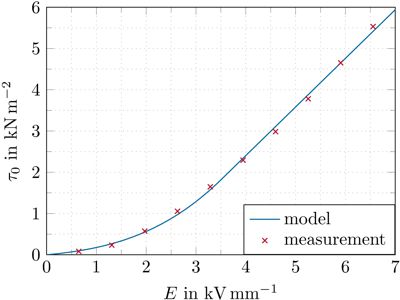
Shear stress as a function of the shear rate for a typical ERF
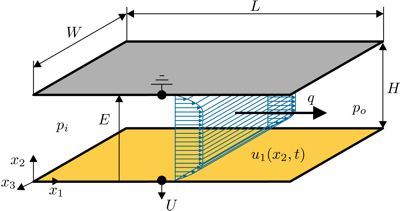
The core part of most electrorheological components is an ER valve, which basically features two (parallel) electrodes, where the ERF is flowing in between, see Fig. 2. By applying an electric voltage to the electrodes, the flow resistance of the valve can be increased. If the electric voltage is chosen large enough, the valve can be even closed completely.
Basic setup of an ER valve
The dynamics of this change of the flow of the ERF is, as already mentioned, very fast. Fig. 3 depicts the characteristics of the fluid velocity \(u_1\) of the ERF in the valve (depicted in Fig. 2) for changes in the voltage and the pressure, respectively.
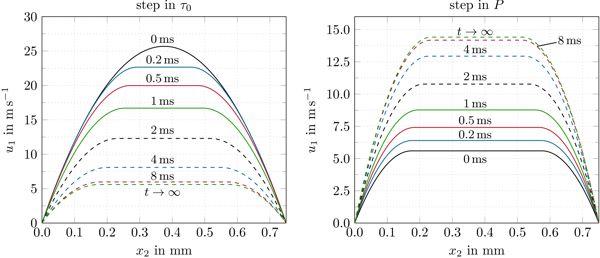
Change of the fluid velocity in an ER valve for changes in voltage and the pressure, respectively
A possible field of application of ERF and ER-valves are automotive suspension systems. Adjustable dampers are utilized in semi-active suspension systems to obtain a good trade-off between driving comfort and driving stability. This can be obtained by adjusting the damping according to the actual road conditions. Fig. 4 depicts a semi-active electrorheological damper for truck applications which was developed in a cooperation with Fludicon. In this research cooperation, mathematical models and control strategies for vehicles equipped with this semi-active suspension systems were derived. It could be shown by means of test drives that a significant improvement of driving comfort and stability can be obtained in comparison to a vehicle, which utilize a classical passive suspension system.
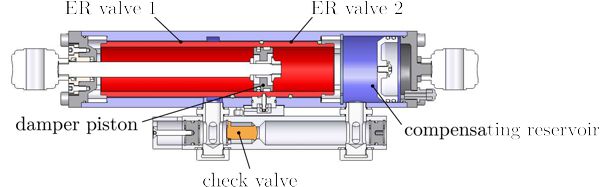
Cross-sectional view of an ER-damper
The possibility to directly influence the characteristics of an ERF by means of an electric field enables to control the flow of ERFs by means of a suitable shaping of the electrodes. A possible application are digital electrorheological valves, which were developed in a further cooperation with Fludicon. The basic idea is to change the flow resistance by means of switching on and off a number of serially connected ER valves. This allows to utilize cheap high voltage power supplies with constant voltage. Utilizing e.g. a binary coding of the length of the electrodes, very small step sizes of the flow resistance can be obtained by a rather small number of serially connected valves, cf. Fig. 5. Possible applications are again semi-active automotive suspension systems.
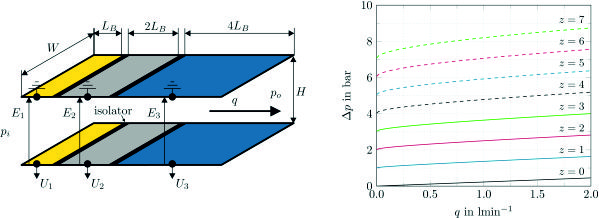
Serial digital ER valve with the resulting characteristics
For the test of the characteristics of the ERF and the ER valves, a test bench was set up. Utilizing transparent electrodes, this test bench also allows to directly monitor the flow of the ERF in the valve and thus to draw conclusions on the flow patterns, see Fig. 6-
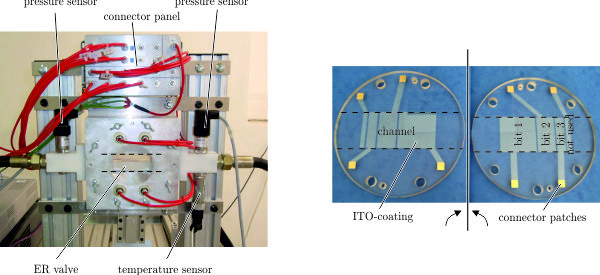
ER test stand and the electrodes of a digital ER valve
The subsequent videos show measurement results obtained on this test bench. The first video shows the digital ER valve depicted in Fig. 6, and the change of the flow through this valve due to the activation of the different parts of the valve. A possibility to actively control the flow of the ERF is studied in the videos 2 and 3. Here, a sinusoidal flow path is generated by suitable electrode shapes, which allow to block parts of the flow path by applying an electric voltage. The results of this experiment could be utilized to build an ER valve in matrix setup, which allows a freely configurable connection of several in- and outputs without any mechanical components.
Selected publications
Project partner
16.08.2017 Active camera stabilization platform
Project focus
Description
In many movie scenes or video clips, the camera is dynamically moved to change the perspective or to make a more engaging film. Typically, camera cranes, steadycams, cable cams, or helicopter cameras are used in the production of such video sequences. To avoid distracting changes of the line of sight induced by movements of the mobile carrier vehicle, the camera is inertially stabilized. For this task, inertially stabilized platforms (ISPs) with gimbaled assemblies are widely used.
In this project, a new active camera stabilization platform developed by qinematiq was considered. It features a gimbal with three degrees of freedom which is actuated by electric motors in each joint. The orientation of the camera and the handle with respect to the inertial frame is measured utilizing inertial measurement units (IMUs), see Fig. 1.
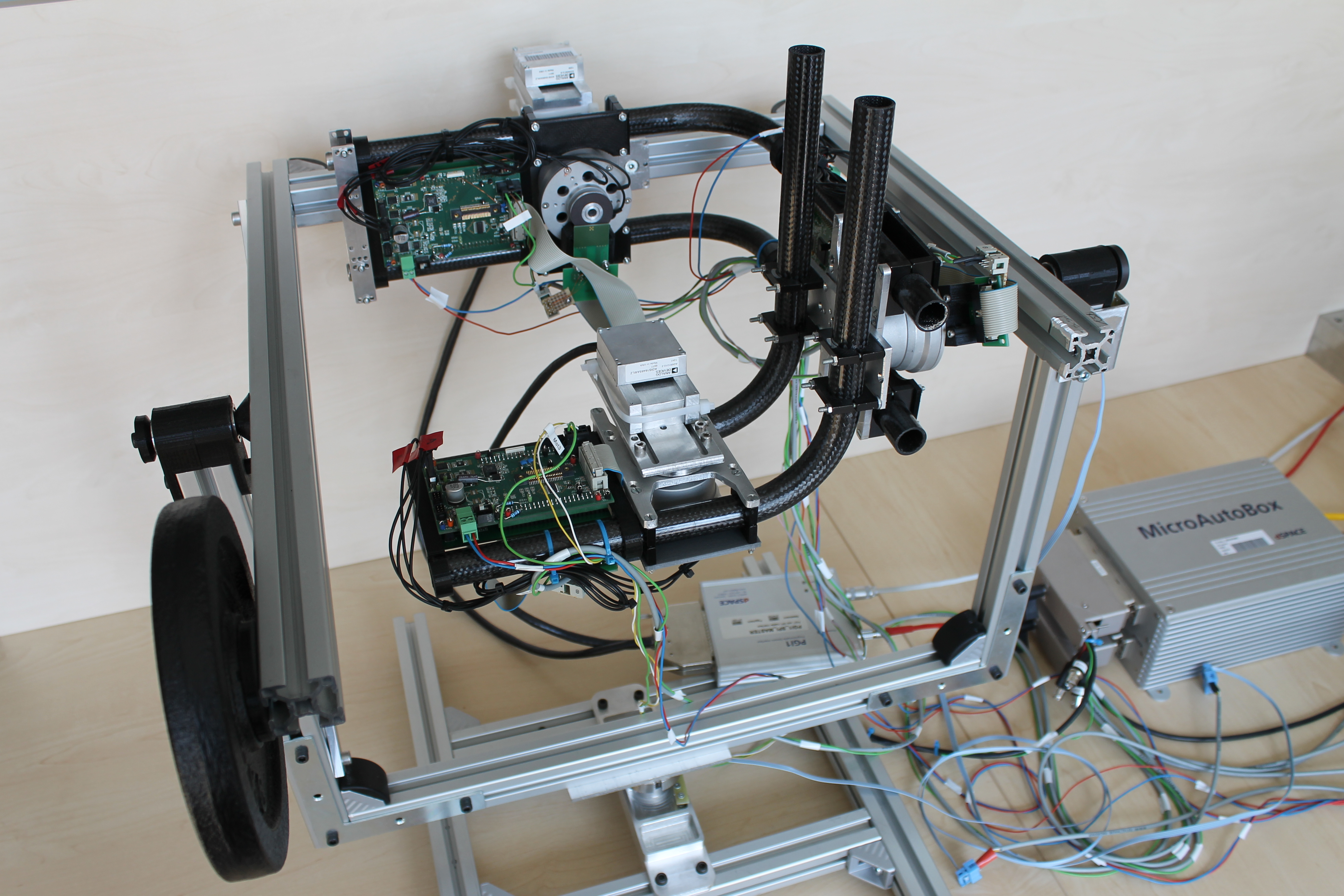
Experimental setup of the camera stabilization platform
The main control task is to control the camera orientation according to a desired orientation which is defined by the camera operator. For this task, a nonlinear flatness-based control strategy was developed, which is based on the estimation of the camera orientation and the orientation of the handle of the platform. In order to obtain these orientations from the measurements of the IMU, a multiplicative extended Kalman filter (MEKF) was developed, which fuses the signals of all sensors of the platform. As an essential step to reach the desired accuracy of the platform, the design and the choice of actuators and sensors of the platform were of immanent importance. The practical feasibility of the overall estimation and control strategy was proven by experiments on a prototype platform.
Selected publications
Project partners and funding
16.08.2017 Mobile DRT VLF test system
Project focus
Description
In recent years, an increased assembly of regenerative energy source, as, e.g., wind farms (on- and off-shore), photovoltaics and biomass, can be observed. These power plants are typically connected to the distribution network by means of high voltage cables (HV, UHV) with voltages up to 500 kV. To test their functionality and to detect failures, suitable test systems for the on-site test of the cables are required.
Due to the high capacity of the considered high voltage cables, a test with grid frequency (50 Hz) would imply very high reactive power. This directly results in large and bulky test systems. To reduce the amount of reactive power and thus the size of the test systems, cables are frequently tested with very low frequencies (VLF, approx. 0,01 Hz to 10 Hz).

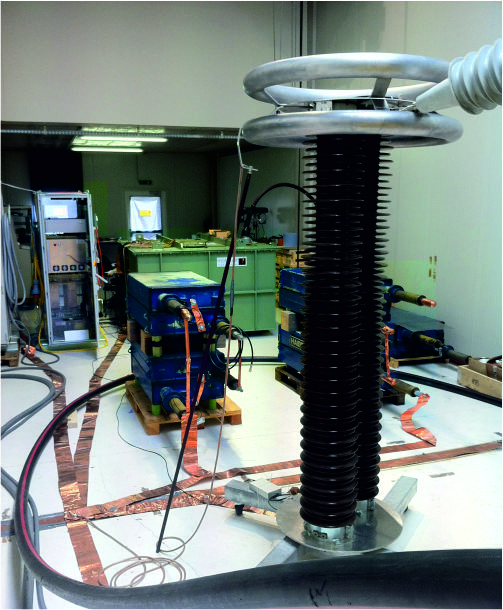
Prototype of the VLF test system designed by mohaupt high voltage
In this project, a prototype of a VLF test system designed by mohaupt high voltage was considered, see Fig. 1. Figure 2 depicts the schematic setup of the test system. It comprises a power module, which drives a series resonance circuit. The resulting amplitude modulated high voltage is demodulated by the demodulator to obtain the desired low frequency high voltage test signal.
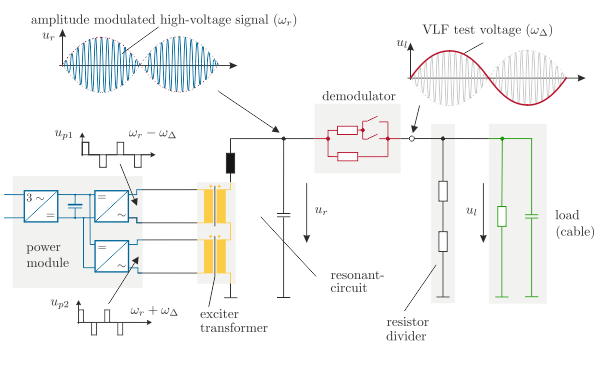
Sketch of the DRT VLF test system
In this project, a detailed mathematical model was developed which incorporates the main nonlinear behavior, in particular of the demodulator. Based on an analysis of the model, a reduced envelope model was developed, which was the basis for the subsequent observer and controller design. The control strategy was designed to minimize the losses of the system and to maximize the quality of the test voltage (minimize the THD value). The control strategy was extended by an estimation strategy for the unknown load (i.e. the cable). Finally, it was shown how to optimally choose the parameters of the system in order to increase the control accuracy of the system. The feasibility and robustness of the control and estimation strategy was proven by means of experiments on the prototype.
Setup for the tests of the control and estimation strategy
Selected publications
Project partners and funding
05.07.2017 Optimization-based control methods applied to a laboratory-scale tower crane
Project focus
Description
Tower cranes are widely-used and constitute an interesting field of application for modern control theory. An important task is to control the position of the hook by suppressing the oscillating motion of the cable at the same time. Another possible goal is the rejection of disturbances such as different load masses or external forces induced by wind.
Different control concepts are developed to cope with theseand further goals. The resulting controllers are tested on a laboratory tower crane. The focus lies on optimization-based control methods, in particular model predictive control (MPC). MPC is able to systematically take into account system constraints and to achieve an optimal behavior of the closed-loop system in the sense of the underlying objective functional. This includes for example the minimization of the energy consumption of the actuators.
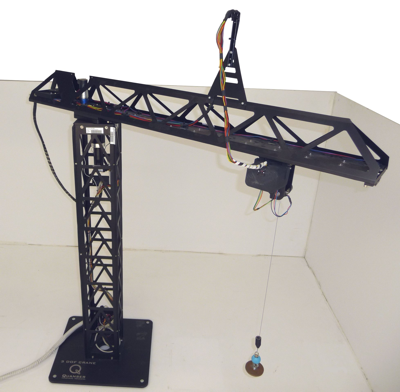
Laboratory-scale tower crane.
To avoid collisions with obstacles, it is required that the hook or rather the load mass follows a given collision-free path as accurately as possible. This task can be tackled from two different directions.
Selected publications
Project partners and funding
The CLIC-project received funding from the FIT-IT program of the Austrian Research Promotion Agency (FFG) (project no. 819482). Besides ACIN, the following partners were involved:
04.07.2017 Hol-I-Wood PR
Project focus
Description
The correction of natural wood defects, such as resin galls or loose dead knots, interrupts the automatized production flow in timber industry. The human workforce is key for detection and classification of wood defects as well as for their correction.
The “Holonic Integration of Cognition, Communication and Control for a Wood Patching Robot”, in short “Hol-I-Wood PR”, project aims at automatizing this monotone and laborious work. The resulting innovative “wood patching”-plant is going to be integrated into the shutter board production line of our partner company.

Loose dead knot.
A multi-sensor system scans the shutter boards and collects the defect data, like position and contour of the loose dead knot given in Fig. 1. A patching robot repairs the defects by drilling a hole and sealing it with one or more patches, see Fig. 2. One wood scanner is able to supply several production lines, which are connected via junctions. In this process, a variety of optimization problems do occur, which have to be solved in real-time.
To start with, the minimum number of patches and their arrangement have to be calculated for each defect. The arrangement of the patches is severly restricted, since one has to ensure the proper connection between the patches and the shutter board.
The next task is to compute the time optimal robot path between the patch locations. This challenging combinatorial optimization problem, similar to the so-called “Travelling Salesman Problem”, moreover is time variant, since the shutter boards are flexibly allocated to the individual production lines. Consequently, the patch locations are announced to the patching robot as a (more or less) continuous flow of patch locations.
Following the allocation of the shutter board to a specific patching robot, it requests the shutter board data from a data base, moves the board by means of time optimal trajectory planning and visual position control along the desired path and places the patches.
For this purpose, position data of the board delivered by the camera network and position data acquired from standard sensors, which all have different precision and sampling time, must be merged.

Patched defect.
Due to the natural tolerances of wood and the rough production environement in saw mills, the automation design has to be robust, fault tolerant and flexible. This is achieved by modern observer and control concepts.
Furthermore, the Automation and Industrial Control Systems group of ACIN ensures maximum capacity utilization by means of flexible shutter board assignment, redirection or even buffering between the individual production lines. In case of malfunction of one or more patching robots, the shutter boards are redirected instantaneously in order to prevent unnecessarily high loss of production.
Applications
The repair of defects increases the wood’s value, regardless of the final product. In the case of shutter boards their usability is ensured, whereas in the case of furniture or window frames their appearance is improved.
Considering a more general context, similar tasks, e.g., optimal path planning, positioning of parts that are merely moved via friction or maximum capacity utilization, occur in a wide range of production chains.
Selected publications
Project partners and funding
Together with ACIN three further public research institutions as well as four industry partners from five countries of the European Union collaborated in the “Hol-I-Wood PR” project:
The project was funded by the 7th Framework Programme of the European Commission.
29.06.2017 Modeling, observer design, and control of continuous strip processing lines
29.06.2017 Optimal Control of pneumatic linear drives
Project focus
Description
The demands on today’s production regarding progressive flexibility and cost reduction as well as resource-efficiency require new approaches in each part of a production line.
Nowadays, pneumatics is popular in various industries, in particular in automation technology, pneumatic actuators are widly used.
Future pneumatic linear drives have to realize fast point-to-point positioning with high accuracy and minimal sensor effort at minimum energy consumption. The use of an inexpensive, discrete distance measurement, instead of a costly continuous position sensor, represents a challenge for the controller design for point-to-point movements. The lack of continuous position information must be compensated by an intelligent control of the drive.
Horizontal test bench with a pneumatic linear drive.

Fast switching valves mounted on a valve block.
In this project, low-cost switching valves are used to control linear pneumatic drives. The aim of this project is to design an optimal control strategy for the valves in order to accomplish a point-to-point motion of the piston actuator. Here, time-optimal and energy-efficient positioning of the piston is required, which is robust against fluctuations in the supply pressure and changing load forces.