
Sasha2019 - 2022
The purpose of this project is to investigate methods needed to make a robot keep order in an assigned space. Weiterlesen →

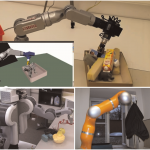
Aeolus2017 - 2019
The goal of the project with Aeolus is to advance current robotic capabilities to pick up unknown objects in conditions of clutter and fetching known objects. Weiterlesen →
InDex2019 - 2022
The InDex project aims to understand how humans perform in-hand object manipulation and to replicate the observed skilled movements with dexterous artificial hands, merging the concepts of deep reinforcement and transfer learning to generalise in-hand skills for multiple objects and tasks. Weiterlesen →
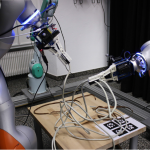
HEAP2019 - 2022
In HEAP we focus on advancing the state-of-the-art for sorting a heap of unknown, irregular objects and provide appropriate benchmarks. Weiterlesen →

BURG2019 - 2022
In the BURG Project we set out to boost grasping research by focusing on complete tasks and the related object manipulation constraints. Weiterlesen →
RoboCoop2018 - 2022
Das Projekt soll das Interesse junger Menschen an MINT-Fächern erwecken, um den derzeitigen Mangel in diesen Bereichen zu decken. Unter anderem werden Workshops angeboten, in welchen SchülerInnen die Möglichkeit geboten wird, Roboter kennen zu lernen. Weiterlesen →
iBridge2017 - 2019
Beim Projekt iBridge handelt es sich um ein generationsübergreifendes Projekt, dass die Steigerung des Interesses von Kindern und Jugendlichen an Forschung in sozial- und kulturübergreifenden Szenarien, an Technologie und Innovation sowie einer Vertiefung des Bezugs zu Naturwissenschaft und Technik durch das Thema Robotik in der Altenpflege zum Ziel hat. Weiterlesen →
Modellierung und optimale Regelung von elektrischen Motoren mit redundanten Wicklungssystemen
Ein Fehler eines elektrischen Motors kann in manchen Anwendungen zu einem potenziell gefährlichen Verhalten des Gesamtsystems führen. In diesem Forschungsprojekt werden Methoden zur Fehlererkennung sowie den fehlertoleranten Betrieb von Permanentmagnet-Synchronmotoren entwickelt. Weiterlesen →
Modellierung und Regelung von Spritzgießmaschinen
Spritzgießen ist das am weitesten verbreitete Produktionsverfahren zum Erzeugen von Kunststoffbauteilen. In diesem Forschungsprojekt werden Regelungsstrategien für den optimalen Betrieb von Spritzgießmaschinen entwickelt. Weiterlesen →
Modellierung und optimale Regelung von Permanentmagnet-Synchronmotoren
Permanentmagnet-Synchronmotoren (PMSM) sind sehr weit verbreitet in vielen Industrieanlagen (z.B. der Robotik). Dieses Forschungsprojekt beschäftigt sich mit der optimalen Regelung von PMSM, wobei vor allem die magnetische Sättigung und nicht-sinusförmige Feldgrößen systematisch berücksichtigt werden. Weiterlesen →