GRASP2008 - 2010
The aim of GRASP is the design of a cognitive system capable of performing tasks in open-ended environments, dealing with uncertainty and novel situations. The design of such a system must take into account three important facts: i) it has to be based on solid theoretical basis, and ii) it has to be extensively evaluated on suitable and measurable basis, thus iii) allowing for self-understanding and self-extension. Weiterlesen →
Austrian Kangaroos2008 - 2009
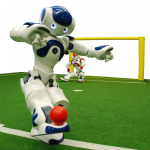
Roboterfussball hat einen hohen Unterhaltungswert, ist aber in Wirklichkeit eine ernsthafte Testumgebung für Forschung und Entwicklung in allen Bereichen. Die standardisierten humanoiden Roboter bieten eine ideale Entwicklungsplattform, die an zahlreichen internationalen Universitäten genutzt wird. So wird neben neuartigen Geh-Algorithmen und Künstlicher Intelligenz auch intensiv an verbesserter Computerbildverarbeitung und im Bereich echtzeitfähiger hochparalleler Softwarearchitekturen für Embedded Systems geforscht. Weiterlesen →
CogX2008 - 2012
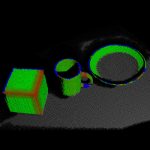
The ability to manipulate novel objects detected in the environment and to predict their behaviour after a certain action is applied to them is important for a robot that can extend its own abilities. The goal is to provide the necessary sensory input for the above by exploiting the interplay between perception and manipulation. Weiterlesen →

Robots @ Home2007 - 2010
The objective of robots@home is to provide an open mobile platform for the massive introduction of robots into the homes of everyone. The scenario-driven approach is inspired by recent work in cognitive science, neuroscience and animal navigation: a hierarchical cognitive map incorporates topological, metric and semantic information. Weiterlesen →
XPERO2006 - 2009
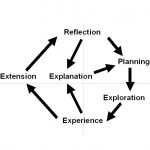
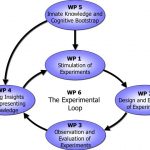
Das Experimentieren in der realen Welt ist der Schlüssel um neue Erkenntnisse zu erwerben und kognitive Fähigkeiten zu entwickeln. Je umfangreicher und lehrreicher die Experimente sind, desto umfangreicher sind die Erkenntnisse. Weiterlesen →

NFN2003 - 2006
Wir haben alle schon einmal nach persönlichen Gegenständen oder nach dem richtigen Weg in einer uns unbekannten Umgebung gesucht. Technische Lösungen einer adäquaten Hilfestellung für unsere Wahrnehmung sind noch in weiter Ferne. Der nun bewilligte FSP „Kognitives Sehen“ beschäftigt sich genau mit dieser Thematik. Der Mensch soll durch ein Sehsystem unterstützt werden, das nicht nur Dinge finden kann, sondern auch die Zusammenhänge zwischen seinen Tätigkeiten und den Dingen versteht. Weiterlesen →
ActIPret2001 - 2004
Das Ziel des Projektes ActIPret ist die Entwicklung einer kognitiven Bildverarbeitungsmethodologie und eines entsprechenden Systems, das Aktionen einer Person, die Objekte handhabt, interpretieren und verstehen kann. Der Schwerpunkt liegt auf der aktiven Beobachtung und Interpretation der Aktionen, auf dem Unterteilen der Bildsequenzen in die zugrundeliegenden elementaren Tätigkeiten und auf der Extraktion der relevanten Aktionen und ihrer funktionellen Zusammenhänge. Weiterlesen →

RobVision2000 - 2000
Um die Teile des Schiffsrumpfes zu verschweißen und die Qualität der Schweißnaht zu prüfen, muss ein sechsbeiniger Roboter in den Schiffsrumpf navigiert werden. Da das Modell des Schiffes vorhanden ist, kann die CAD- Information verwendet werden, um den Roboter mittels eines Bildverarbeitungssystems zu ermöglichen. Die Bildverarbeitung erkennt Merkmale wie Linien, Ellipsen, Eckpunkte oder Regionen und aus der Verknüpfung mit dem CAD-Modell kann die Position und Orientierung des Roboters im Schiff laufend berechnet werden. Weiterlesen →

FlexPaint2000 - 2002
Das Ziel des Projektes FlexPaint ist der Aufbau eines Systems zur vollautomatisierten Lackierung aller Teile einer Lackierstraße. Dies gilt vor allem für Lackierstraßen mit Losgröße eins. Das heißt, dass ohne Wissen über die Art und die exakte Lage der Teile diese lackiert werden sollen. Das Projekt wird eine Lösung basierend auf Range-Sensoren und einer automatischen Bahnberechnung erarbeiten. Weiterlesen →
Tracking Evaluation2001 - 2004
We propose a methodology based on the evaluation of a video database which contains real-world image sequences with well-defined movements of modeled objects. It is suggested to set up and extend this database as a benchmark. Weiterlesen →